pixelNeRF: Neural Radiance Fields from One or Few Images (CVPR2021)

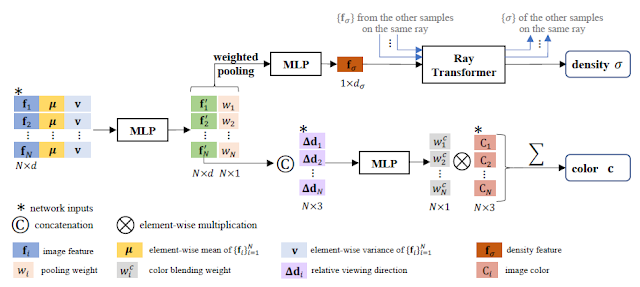
pixelNeRF: Neural Radiance Fields from One or Few Images https://alexyu.net/pixelnerf/ 1枚または少数の画像からNeural Radiance Filedを構築する手法.基本的なアイデアは IBRNet と同様で,入力画像を直接利用するのではなく,CNNを用いて抽出したfeature vectorからRGBσを出力するようなネットワークを学習する.単一の視点の場合は光線上のサンプルした点を入力画像上へ投影し,投影先のfeature vectorを用いる.複数視点の場合はそれぞれの視点へ投影し対応するfeature vectorを取得,その後,平均を取り利用する. 同一カテゴリのデータで学習したモデルを利用することで,未知のシーンに対してもRadiance Fieldを構築することが出来る. pixelNeRF,IBRNet双方に NeRF の別々の著者が名前を連ねているが,IBRNetの方がより手法が洗練されている印象.